
„Chrząszcz” z Wrocławia leci na zawody do USA


- Jego innowacyjność polega na tym, że on musi się sam odnaleźć w tej przestrzeni, wykryć np., że idzie człowiek, że ma przeszkodę, kałużę i ominąć to, albo w jakiś inny sposób zareagować i dotrzeć do wyznaczonego celu - wyjaśnia Mateusz Michalak, prezes Koła Naukowego Robotyków „KoNaR” na Politechnice Wrocławskiej.
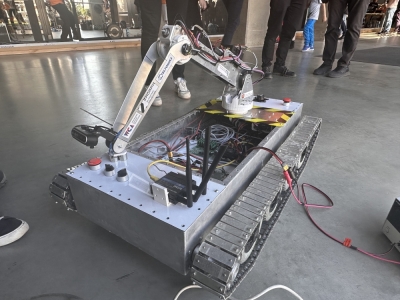
Ważący 6 kg robot został zbudowany na platformie zdalnie sterowanego samochodu, w którym studenci całkowicie zmodyfikowali elektronikę.
- Robot na początku był sterowany pilotem, obecnie jest wyposażony przez nas w superkomputer, a także trzy płytki, których jesteśmy autorami - dodał Michalak.
Jedna z zaprojektowanych przez studentów płytek steruje zasilaniem, ponieważ pojazd ma różne źródła i poziomy napięć, kolejna odbiera sygnały od komputera i steruje silnikami. Trzecia jest płytką typowo czujnikową obsługującą przede wszystkim czujnik AHRS, czyli połączenie żyroskopu, akcelerometru i magnetometru.

Każde koło pojazdu ma niezależne zawieszenie i napęd. Na platformie studenci zamontowali także m.in. odbiornik GPS oraz lidar, czyli urządzenie przypominające radar, ale wykorzystujące światło zamiast mikrofal.
- Robot odbiera sygnał GPS, więc ma pozycję, gdzie się znajduje. Ma na sobie lidar, który wykrywa przeszkody w jego bliższym otoczeniu. I na podstawie tych danych, a także zadanej pozycji, planuje sobie trasę i wybiera najkrótszą ścieżkę, żeby dojechać do zadanego punktu, z ominięciem przeszkód, które wykrywa na bieżąco - mówi Michalak.
Robot będzie miał też specjalną obudowę, która ma go chronić przed opadami i uszkodzeniami mechanicznymi. Zmodyfikowane baterie wystarczają na niemal dwie godziny jazdy, co daje zasięg nawet kilkudziesięciu kilometrów. „Chrząszcz” powstał na międzynarodowe zawody robotów RoboGames, które pod koniec kwietnia odbędą się pod San Francisco w Dolinie Krzemowej.
- Konkurencja, w której wystartujemy, nazywa się Robomagellan. Polega ona na tym, że dostajemy koordynaty GPS, w których znajduje się pachołek drogowy. Robot, omijając różne przeszkody, np. drzewa czy wysokie krawężniki, ma dojechać do pachołka i go dotknąć - wyjaśnił współtwórca robota Łukasz Chojnacki.

Jednym z nowatorskich elementów robota jest wizja za pomocą kamery stereowizyjnej, dzięki której robot wykrywa, gdzie aktualnie znajduje się miejsce, do którego docelowo ma dojechać.
Rozwiązania i technologie zastosowane przez wrocławskich studentów są wykorzystywane m.in. w konstruowaniu samochodów autonomicznych oraz robotów, które same muszą zlokalizować swoje położenie.
- Technologię, którą rozwijamy w tej platformie, możemy bez problemu zastosować w różnych pojazdach autonomicznych, w tym w samochodach autonomicznych. Mam nadzieję, że w przyszłości we Wrocławiu taki pojazd będzie jeździł - podsumował Chojnacki.
Radio Wrocław nie odpowiada za treść komentarzy.













![Tłusty czwartek z Radiem Wrocław! Rozdaliśmy naszym słuchaczom setki pączków we Wrocławiu [ZDJĘCIA]](http://www.radiowroclaw.pl/img/articles/148720/mini/vS5LHfHTRW.jpg)
![Dolnośląska Zima 2025. Tak się bawiliśmy w Świeradowie-Zdroju [ZDJĘCIA, WIDEO]](http://www.radiowroclaw.pl/img/articles/148618/mini/tPMu3lT7FC.jpg)



